自5月中旬开展教育思想大讨论工作以来,数理教学部教职工认真学习文件精神,对标部门工作特点,分主题、有层次开展教育思想大讨论工作。近日,结合课程思政建设工作,数理教学部张勇副教授为部里青年教师和专业系学生讲了一堂有思想、有内涵的线上视频公开课。
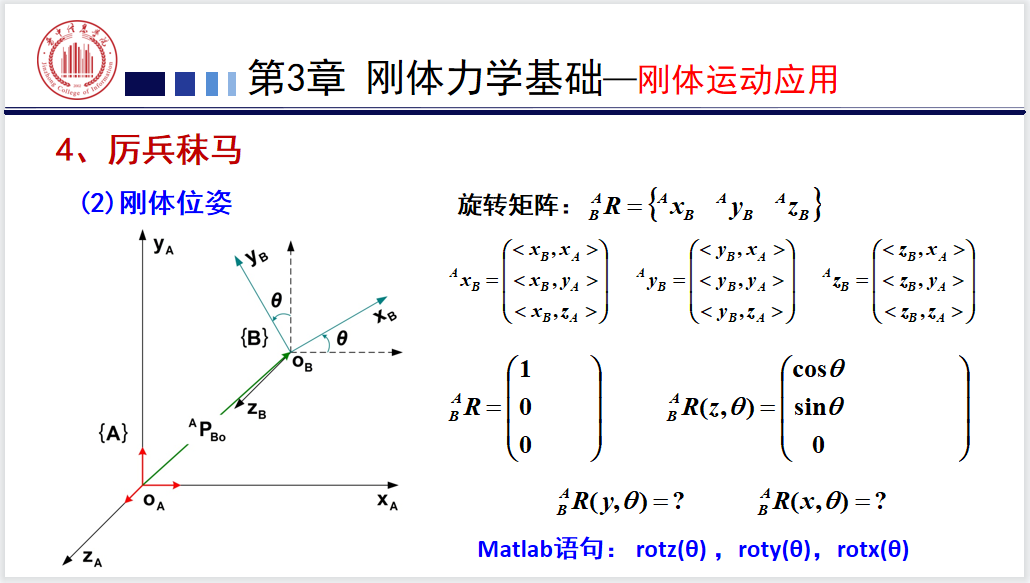
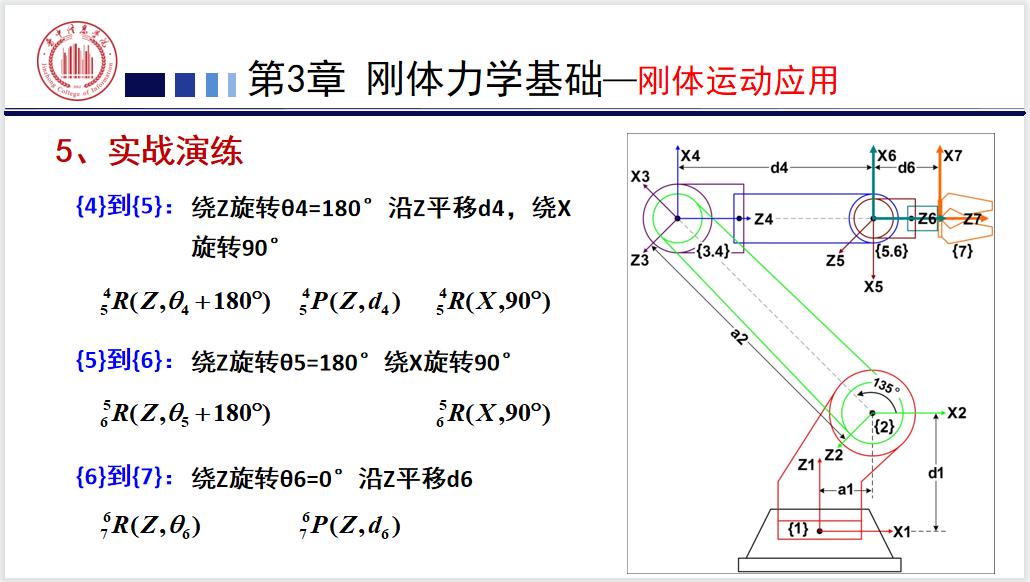
在公开课上,张老师从专升本学生的专业特点、认知基础和就业需求出发,结合大学物理第三章刚体力学教学内容,合理选定建立工业机器人正运动学方程为教学课题。从刚体的位姿描述及位姿变换入手,巧妙地引入了齐次位姿变换矩阵,确定了位姿变换的方法和原则;同时将六轴机器人分解为连杆和关节系统,避开专业教学中建立连杆坐标系和选用D-H参数的方法,采用全新的方法建立了机器人的关节坐标系,实施了从机器人基座到末端执行器的位姿变换,给出了对应的matlab函数语句,既保证了物理教学与专业教学的有效衔接,又合理避免了将物理课讲成专业课,做到了到位不越位。
张老师的公开课体现了其个人对教学的严苛要求和极致追求,值得广大青年教师学习和效仿。疫情期间张老师利用各种途径搜集相关教学资料,研读和学习了大量机器人设计相关知识和技术,做到了“要给别人一勺水,自己须有一桶水”。教学幻灯片中自行绘制了大量的Visio线图和CAD三维设计图,将复杂的机器人结构直观的展现在大家面前;利用动画和分解动作使坐标变换的过程细节更加真切,利用肢体语言巧妙地引导大家习练右手定则,使复杂的关节坐标系建立过程跃然纸上。张老师的讲稿先后改写了十余遍,个人对着屏幕试讲了多次,真正做到了字字斟酌,句句打磨。在教学环节设计上体现了张老师一贯的部队作风,比如在二级标题设计上就用到了演练目标、战场态势、厉兵秣马和实战演练等词汇,将整个应用案例刻画成一场生动的个人认知与知识获取之间的对抗。
本次教学还体现了张老师对课程思政的深入思考和有效尝试。首先从初衷来讲,本堂课课题设计的目的就是要引起广大教师和青年学生对工业机器人发展的关注;提升大家对核心技术和卡脖子问题的忧患意识和奋进情怀。其次,就具体而言,张老师从工业机器人国内数量和核心技术占比现状入手,阐明关键技术从国外进口必然受制于人;从刚体的姿态朝向描述外推到“心中有信仰,前行有方向,脚下有力量”;联系航天员舱内试验及地面指挥员的“北京明白”讲解坐标系关系和坐标系变换。张老师还针对年轻人的兴趣特点,谈到刘慈欣先生《三体》小说中从高维空间审视低维空间的效果,类比三维坐标变换到齐次位姿变换。这堂公开课让人听不出说教却感受到了思政,真正做到了润物细无声,真正做到了课程思政与教学内容的深度融合。
(作者:gonggongke 编辑:gonggongke)
